Honor Lightning Sets Marathon Robot Record in 50 26
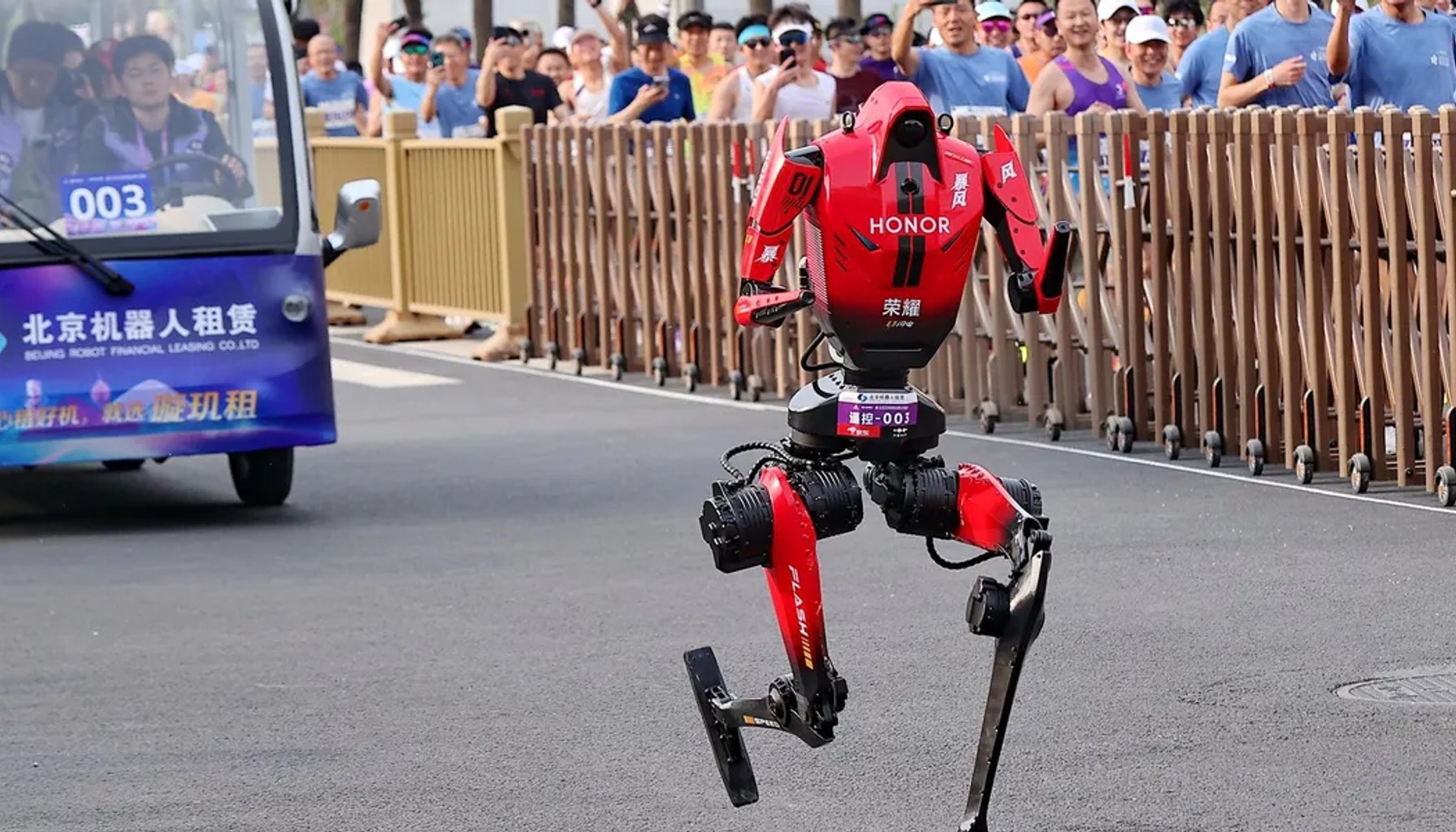
Honor Lightning finished a half marathon in 50 minutes and 26 seconds, shattering robot speed records.
On April 19, 2026, the fielded humanoid did something no legged robot had managed before: run a long, endurance test at humanlike pace for a half marathon and beat the human world record by seven minutes while exceeding the best robotic time by almost two hours. The feat isn’t just a flashy demo; it’s a practical verdict on where the most important constraints sit when you push a walking machine beyond sprinting into sustained gait.
The core spec that changes feasibility is a careful balance between torque and speed inside the leg actuation. Documentation indicates there is a sweet spot for gear reduction that minimizes energy draw per stride. In the analyzed design, engineers settled around a roughly 30 to 1 gear ratio to deliver enough ground reaction force without forcing the motor rotor to spin at dizzying speeds that burn energy as heat. That balance matters because motors produce torque but heat as a byproduct, and a heavier gear train can boost torque yet slow down the leg’s swing and rob responsiveness. The result, tested under race conditions, is a gait energy profile that keeps the legs moving long enough to cover miles without turning the run into a sauna for the payload and electronics.
The race also exposed the stubborn reality of heat management in endurance legged robots. Against this benchmark, Unitree reportedly relied on an ice backpack to manage overheating, a stark reminder that raw motor power must be kept within thermal envelopes when the goal is minutes-per-mile endurance rather than a few strides of sprint speed. That comparison underscores a practical truth: energy efficiency, not sheer torque, is what makes a marathon run feasible for humanoids. Testing shows that even modest gains in thermal design or control efficiency can translate into meaningful seconds per kilometer over a long course.
From a mechanics-and-control standpoint, the story tracks with the physics of running: the leg spends most of its cycle pushing against the ground in stance while the other leg swings forward for the next foothold, with gravity doing the rest during the aerial phase. Electric motors convert energy into torque, and every extra watt burned as heat erodes ability to maintain stride frequency. A larger gear reduction helps with torque, but to stay responsive during the swing, the rotor must accelerate, which complicates the energy budget. The practical takeaway for operators is that the performance hinge is not the motor alone; it is the integration of motor, gearbox, sensing, and timing of foot placement, all tuned to maintain consistent cadence under fatigue.
For the industry, the implications are clear. This marathon-grade demonstration accelerates attention to the tradeoffs that matter in fielded humanoids: thermal envelopes that tolerate sustained activity, battery and power management aligned with gait planning, and mechanical designs that keep a tight leash on energy per stride without sacrificing control. The next milestones will likely hinge on refining heat rejection, pushing energy-dense but safe batteries, and tightening the control stack so perception and actuation respond coherently to varied terrain and microclimates.
What to watch next: expect more emphasis on cooling strategies that scale with endurance, refined gear ratios or adaptable transmissions that can switch modes between sprinting and long-distance pacing, and gait-control algorithms that tolerate real-world variability without a plunge in efficiency. The path to production-ready long-endurance humanoids will hinge on making the same balancing act automatic, repeatable, and robust across conditions.
- The Secret to Marathon-Winning Humanoid RobotsIEEE Spectrum Robotics / Independent source / Published JUN 17, 2026 / Accessed JUN 17, 2026